Einfache Algorithmen
Auf dieser Seite werden ein paar einfach Computer Vision Algorithmen gezeigt und erklärt.
Background Subtraction

Wollen wir beispielsweise Bewegung auf einem Bild erkennen, so ist es hilfreich eine Art “Green-Screen” zu haben, welcher dann nur die Bereiche zeichnet, welche sich verändern. Dies erreichen wir mit einem sog. Background-Removal oder Background-Substraction. Dazu vergleichen wir ein statisches Referenzbild mit einem Live-Bewegtbild. Wenn die Differenz zwischen beiden Bildern (und damit die Differenz der Farbwerte an der Selben Stelle) grösser ist als ein bestimmter Schwellenwert, können wir davon ausgehen, dass an diesem Punkt Bewegung stattfindet. Leider muss man als Abstrich sagen, dass die automatische Helligkeitskorrektur der iSight Kamera sich schlecht für diese Methode auswirkt.
import processing.video.*;
Capture video;
PImage backgroundImage;
float threshold = 20;
void setup() {
size(640, 480);
// start video captire
video = new Capture(this, width, height, 30);
video.start();
// prepare image to save background
backgroundImage = createImage(video.width, video.height, RGB);
}
void draw() {
// read camera image if available
if (video.available()) {
video.read();
}
// active pixel manipulation of canvas
loadPixels();
// get pixel data from video and background image
video.loadPixels();
backgroundImage.loadPixels();
// loop through video pixel by pixel
for (int x=0; x < video.width; x++) {
for (int y=0; y < video.height; y++) {
// get pixel array location
int loc = x + y * video.width;
// get foreground color (video)
color fgColor = video.pixels[loc];
// get background color (image)
color bgColor = backgroundImage.pixels[loc];
// get individual colors
float r1 = red(fgColor);
float g1 = green(fgColor);
float b1 = blue(fgColor);
float r2 = red(bgColor);
float g2 = green(bgColor);
float b2 = blue(bgColor);
// calculate spacial distance between the two colors
float dist = dist(r1, g1, b1, r2, g2, b2);
// check if distance is above threshold
if (dist > threshold) {
// write foreground pixel
pixels[loc] = fgColor;
} else {
// set pixel to black
pixels[loc] = color(0);
}
}
}
// write pixel back to canvas
updatePixels();
}
void mousePressed() {
// copy current video frame into background image
backgroundImage.copy(video, 0, 0, video.width, video.height, 0, 0, video.width, video.height);
backgroundImage.updatePixels();
}
Hellster Punkt

Für die direkte Steuerung eines Interfaces kann es hilfreich sein, zu wissen, wo sich der hellste Punkt in einem Bild befindet. Dazu wird ein PVector erstellt und eine Variable, welche den jeweils hellsten Wert für das aktuelle Frame beinhaltet. Durch das Vergleichen der Helligkeitswerte im ganzen Frame kann sehr schnell der Hellste Punkt bestimmt werden.
import processing.video.*;
Capture video;
void setup() {
size(640, 480);
// start video capture
video = new Capture(this, width, height, 30);
video.start();
}
void draw() {
// read new video frame if available
if (video.available()) {
video.read();
}
// initially set brightness to zero
float brightness = 0;
// initially set point to center
PVector point = new PVector(width/2, height/2);
// go through video pisel by pixel
for (int x=0; x < width; x++) {
for (int y=0; y < height; y++) {
// get pixel location
int loc = x + y * width;
// get color of pixel
color c = video.pixels[loc];
// check if brightness is higher than current value
if (brightness(c) > brightness) {
// set new brightness
brightness = brightness(c);
// save location of brighter point
point.x = x;
point.y = y;
}
}
}
// draw video
image(video, 0, 0);
// draw circle
ellipse(point.x, point.y, 20, 20);
}
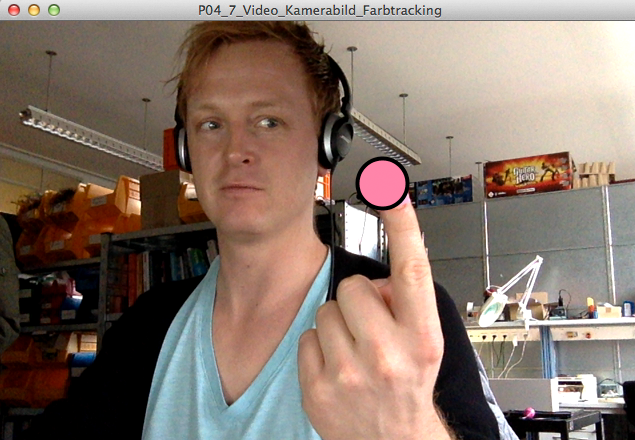
Farbtracking
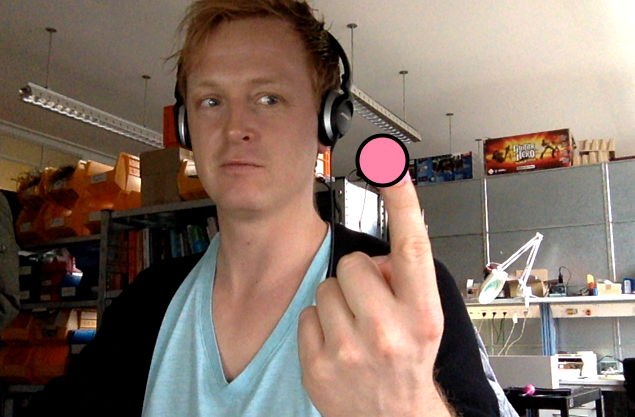
Das Farbtracking ist eine sehr einfach Method um ein farbiges Objekt in einem Bild zu finden. Dazu wird einfach der Punkt im Bild gesucht der der festgelegtern Farbe am ähnlichsten ist.
import processing.video.*;
Capture video;
color trackColor;
void setup() {
size(640, 480);
// start video capture
video = new Capture(this, width, height, 15);
video.start();
// initialize track color to red
trackColor = color(255, 0, 0);
}
void draw() {
// read video frame if available
if (video.available()) {
video.read();
}
// load pixels
video.loadPixels();
// draw video
image(video, 0, 0);
// initialize record to number greater than the diagonal of the screen
float record = width+height;
// initialize variable to store closest point
PVector closestPoint = new PVector();
// get track color as vector
PVector trackColorVec = new PVector(red(trackColor), green(trackColor), blue(trackColor));
// go through image pixel by pixel
for (int x=0; x < video.width; x++) {
for (int y=0; y < video.height; y++) {
// get pixel location
int loc = x + y * video.width;
// get pixel color
color currentColor = video.pixels[loc];
// get current color as vector
PVector currColorVec = new PVector(red(currentColor), green(currentColor), blue(currentColor));
// calculate distance between current color and track color
float dist = currColorVec.dist(trackColorVec);
// save point if closer than previous
if (dist < record) {
record = dist;
closestPoint.x = x;
closestPoint.y = y;
}
}
}
// draw point if we found a one that is less than 10 apart
if (record < 10) {
fill(trackColor);
strokeWeight(4.0);
stroke(0);
ellipse(closestPoint.x, closestPoint.y, 50, 50);
}
}
void mousePressed() {
// save color of current pixel under the mouse
int loc = mouseX + mouseY * video.width;
trackColor = video.pixels[loc];
}
Blob Detection

Die Blob Detection is schon ein komplexere Art von Algorithm, wo ein gesamtes Objekt (Blop) zu erkennen versucht wird.
import processing.video.*;
Capture video;
// the color to track
color trackColor;
// a dimensional array to store marked pixels
boolean marks[][];
// the total marked pixels
int total = 0;
// the most top left pixel
PVector topLeft;
// the most bottom right pixel
PVector bottomRight;
void setup() {
size(640, 480);
// start video capture
video = new Capture(this, width, height, 15);
video.start();
// set initial track color to red
trackColor = color(255, 0, 0);
// initialize marks array
marks = new boolean[width][height];
}
void draw() {
// read video frame if available
if (video.available()) {
video.read();
}
// draw video image
image(video, 0, 0);
// find track color with treshold
findBlob(20);
// load canvas pixels
loadPixels();
// draw blob
for (int x = 0; x < width; x ++ ) {
for (int y = 0; y < height; y ++ ) {
// get pixel location
int loc = x + y*width;
// make pixel red if marked
if (marks[x][y]) {
pixels[loc] = color(255, 0, 0);
}
}
}
// set canvas pixels
updatePixels();
// draw bounding box
stroke(255, 0, 0);
noFill();
rect(topLeft.x, topLeft.y, bottomRight.x-topLeft.x, bottomRight.y-topLeft.y);
}
void mousePressed() {
// save current pixel under mouse as track color
int loc = mouseX + mouseY*video.width;
trackColor = video.pixels[loc];
}
void findBlob(int threshold) {
// reset total
total = 0;
// prepare point trackers
int lowestX = width;
int lowestY = height;
int highestX = 0;
int highestY = 0;
// prepare track color vector
PVector trackColorVec = new PVector(red(trackColor), green(trackColor), blue(trackColor));
// go through image pixel by pixel
for (int x = 0; x < width; x ++ ) {
for (int y = 0; y < height; y ++ ) {
// get pixel location
int loc = x + y*width;
// get color of pixel
color currentColor = video.pixels[loc];
// get vector of pixel color
PVector currColorVec = new PVector(red(currentColor), green(currentColor), blue(currentColor));
// get distance to track color
float dist = currColorVec.dist(trackColorVec);
// reset mark
marks[x][y] = false;
// check if distance is below threshold
if (dist < threshold) {
// mark pixel
marks[x][y] = true;
total++;
// update point trackers
if (x < lowestX) lowestX = x;
if (x > highestX) highestX = x;
if (y < lowestY) lowestY = y;
if (y > highestY) highestY = y;
}
}
}
// save locations
topLeft = new PVector(lowestX, lowestY);
bottomRight = new PVector(highestX, highestY);
}