Pololu Servo Controller
Mit dem Polulu Servo Controller können bis zu 8 Servos gleichzeitig angesteuert werden. Zusätzlich können die Servos einfach mit einem externen Netzteil gespiesen werden.
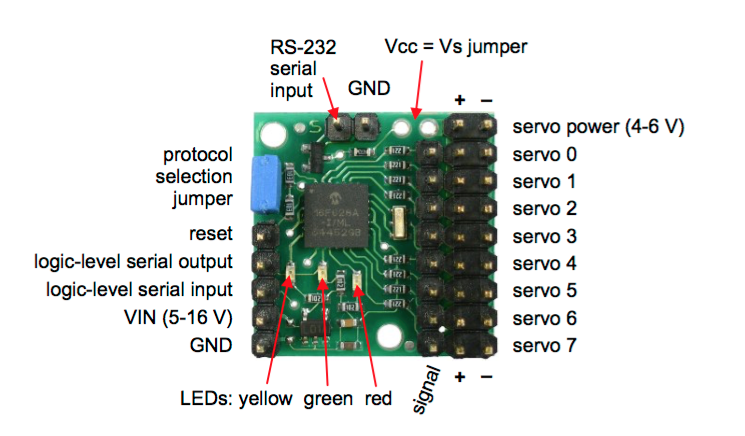
Einfaches Protokoll (mit Jumper)
#include <SoftwareSerial.h>
// pin 6 is to receive from the controller and does not need to be connected
// pin 7 needs to be connect to the serial data input of the board
SoftwareSerial pololu(6, 7);
int pos = 0;
void setup() {
Serial.begin(9600);
pololu.begin(9600);
}
void loop() {
Serial.println(pos);
// set position for eight servos simultaneously
for(int i=0; i<8; i++) {
setPosition(i, pos);
}
pos++;
if(pos >= 255) {
pos = 0;
}
delay(10);
}
void setPosition(int servo, int pos) {
pololu.write(0xFF); // write synchronization flag
pololu.write(servo + 8); // write servo number (without +8 == 90°)
pololu.write(pos); // write position
}
Erweitertes Protokoll (ohne Jumper)
#include <SoftwareSerial.h>
// pin 6 is to receive from the controller and does not need to be connected
// pin 7 needs to be connect to the serial data input of the board
SoftwareSerial pololu(6, 7);
int pos = 0;
void setup() {
Serial.begin(9600);
pololu.begin(9600);
}
void loop() {
Serial.println(pos);
// set position for eight servos simultaneously
for(int i=0; i<8; i++) {
setPosition(i, pos);
}
pos++;
if(pos >= 255) {
pos = 0;
}
delay(10);
}
int setPosition(int servo, int pos) {
byte data2 = pos & B01111111; // calculate second data byte
byte data1 = pos >> 7; // calculate first data byte
pololu.write(0x80); // write start byte
pololu.write(0x01); // write device id
pololu.write(0x04); // write absolute position command
pololu.write((byte)servo); // write servo number
pololu.write(data1); // write first data byte
pololu.write(data2); // write second data byte
}