I2C (de)
Das I2C Interface wurde ursprünglich von Phillips entwickelt um eine Kommunikation von einzelnen Komponenten zu ermöglichen. Manche Hersteller verwenden auch die Bezeichnung TWI Interface (Two-Wired-Interface). Wie der Name schon verrät nutzt das I2C Interface zwei Signalleitungen um mit der Peripherie zu kommunizieren. Eine Leitung ist dabei die Taktleitung (SCL) und die andere die Datenleitung (SDA). Beide Leitungen liegen mit einem Pullup Widerstand an VCC.
In letzter Zeit sind vermehrt Sensoren auf den Markt gekommen, welche das I2C Interface nutzen. Vor allem Beschleunigungssensoren und Sensoren zur Abstandsmessung gehören dazu. Hier eine kleine Übersicht.
Beispiel
1x Arduino
1x MMA7455
2x Widerstand 4.7k
Der MMA7455L ist ein sehr günstiger Beschleunigungssensor von Freescale. Er wird über das I2C Interface angesprochen und kann auf drei verschiedenen Stufen (2g, 4g, 8g) betrieben werden. Um die Handhabung so einfach wie möglich zu machen existiert eine Library für Arduino und der Sensor kommt auf einem Breakout-Board.
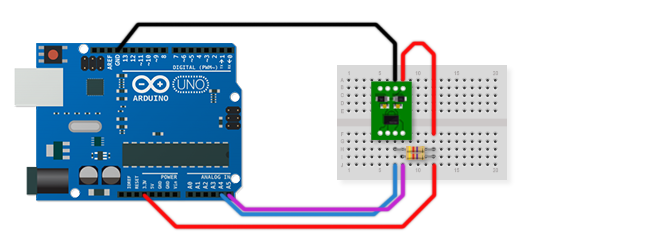
Der Anscluss des Beschleunigungssensors (MMA 7455L) ist relativ einfach. Die i2c Schnittstelle verlangt lediglich zwei Leitungen (Analog4/SCL und Analog5/SDA) wovon eine die Clock bedient und eine die Daten. Um die Kommunikation zu gewährleisten müssen zusätzlich an die SCL und SDA Leitung jeweils ein Pullup Widerstand zu VCC (3.3V) eingefügt werden. Der Sensor läuft mit 2.4–3.7V weshalb wir ihn an dem 3.3V Ausgang des Arduino betreiben. GND wird wie gewohnt mit dem GND des Arduino verbunden.
Funktionen
MMA_7455
Diese Funktion instanziert die MMA_7455 Library und aktiviert die Wire Library, welche für die Kommunikation über I2C gebraucht wird.
initSensitivity(int)
Hier wird festgelegt, wie sensibel der Sensor reagieren soll. Dies hängt stark von der Nutzung des Sensors ab. Über die Variable kann die Sensibilität angegeben werden. Dabei gilt: 2=2g, 4=4g und 8=8g.
calibrateOffset(float, float, float)
Hier kann das Offset des Sensors kalibriert werden. Über die drei float-Werte können Korrekturen vorgenommen werden. Um die korrekten Werte dafür zu ermitteln sollten zunächst ohne Kalibrierung die Werte des Sensors ausgelesen werden, wenn dieser auf einer flachen Oberfläche aufliegt. Die so erhaltenen Werten sollten so korrigiert werden, dass für xVal+float = 0, yVal+float = 0 und zVal+float = 64 herauskommt. Dann kann die calibrateOffset() Funktion im setup() einmalig mit den korrigierten Werten aufgerufen werden.
readAxis(char)
Hier wird der Sensor ausgelesen. Durch die Übergabe des entsprechenden Parameters (‘x’, ‘y’ oder ‘z’) wird die gewünschte Achse angesprochen.