Lynx Smart Motion Servo

The Lynxmotion Smart Servos (LSS) are compact, modular and configurable actuators that provide greater control than standard PWM servos. The servo lineup currently includes three “smart servos” which appear physically the same, sharing the same dimensions and mounting points but differing in maximum torque and speed.
Power: The servos need 6-12V, and 12v for maximum speed and torque.
Getting Started:
Action Commands:
The lynx motion has a simple serial protocol for controlling the motor, that is human-readable:
Number sign #
Servo ID number as an integer
Action command (two to three letters, no spaces, capital or lower case)
Configuration value in the correct units with no decimal
End with a control / carriage return '<cr>'
Ex: #5PD1443<cr>
Additional Parts:
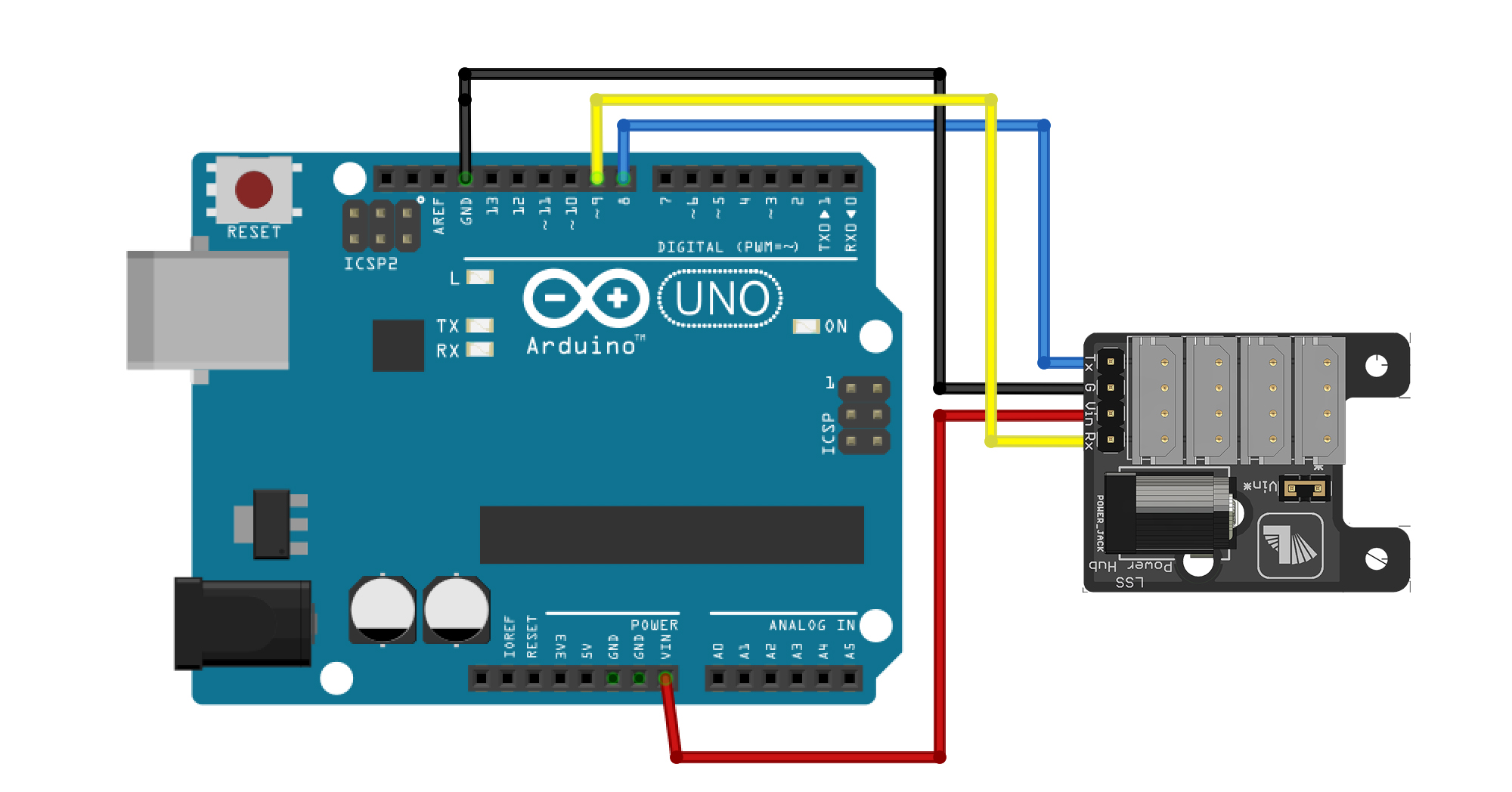
Hookup with Power-hub
The power hub is the most universal way of connecting to the motors. You will need an external power source with a 5mm jack for 12v. Care should be taken when connecting the VIN pin, as this will be 12 volts!
Example Code for Arduino
Ther is a custom LSS library for Arduino, but it's not necessarily needed to control the smart servos, and it is not compatible with the IAD shields for both MKR and Arduino Uno.
This example cycles through the LED colours of the smart servos.
#include <SoftwareSerial.h>
#define rxPin 8
#define txPin 9
SoftwareSerial mySerial(rxPin, txPin); // Create the new software serial instance
#define LSS_ID 254 // ID 254 to broadcast to every motor on bus
void setup()
{
mySerial.begin(115200); // Important! this is the standard speed for talking to LSS
mySerial.print("#0D1500\r"); // this is used to clear the serial buffer
}
void loop()
{
// Loop through each of the 8 LED color (black = 0, red = 1, ..., white = 7)
for (uint8_t LEDCode = 0; LEDCode <= 7; LEDCode++){
// Set the color (session only) of the LSS
// Options are:
// LSS_LED_Black = 0
// LSS_LED_Red = 1
// LSS_LED_Green = 2
// LSS_LED_Blue = 3
// LSS_LED_Yellow = 4
// LSS_LED_Cyan = 5
// LSS_LED_Magenta = 6
// LSS_LED_White = 7
mySerial.print(String("#") + LSS_ID + String("LED") + LEDCode + "\r"); // set LED
delay(1000);
}
}
This example goes through the basic setup and movement
#include <SoftwareSerial.h>
#define rxPin 8
#define txPin 9
SoftwareSerial mySerial(rxPin, txPin); // Create the new software serial instance
#define LSS_ID 254 // ID 254 to broadcast to every motor on bus
void setup()
{
mySerial.begin(115200); // Important! this is the standard speed for talking to LSS
mySerial.print("#0D1500\r"); // this is used to clear the serial buffer
}
void loop() {
// Move the LSS continuously in one direction
mySerial.print(String("#") + LSS_ID + String("WR") + 10 + "\r"); // RPM move
delay(5000);
// Move the LSS continuously in the oposite direction
mySerial.print(String("#") + LSS_ID + String("WR") + -10 + "\r"); // RPM move
delay(5000);
// faster!
mySerial.print(String("#") + LSS_ID + String("WR") + -60 + "\r"); // RPM move
delay(3000);
// go Limp!
mySerial.print(String("#") + LSS_ID + String("L") + "\r"); // Limp
delay(5000);
// move relative from current position in 1/10° (i.e 100 = 10 degrees)
mySerial.print(String("#") + LSS_ID + String("D") + int(60*10) + "\r"); // move 100 degrees
delay(5000);
// Move to specific position in 1/10° (i.e 100 = 10 degrees)
mySerial.print(String("#") + LSS_ID + String("D") + int(360*10) + "\r"); // move 360 degrees
delay(7000);
}
Multiple Servos
For controlling multiple servos, you will first need to give each motor a unique ID. You must attach each motor separately and modify the code below to change its ID to a value between 0 and 253. Afterwards, the servo will always remember it’s new ID.
#include <SoftwareSerial.h>
SoftwareSerial mySerial(8, 9);
// ID set to default LSS ID = 0
#define LSS_ID_old 354 // ID 254 to broadcast to every motor on bus
#define LSS_ID 0 // the new ID
// Create one LSS object
LSS myLSS = LSS(LSS_ID);
void setup()
{
mySerial.begin(115200); // Important! this is the standard speed for talking to LSS
mySerial.print("#0D1500\r"); // this is used to clear the serial buffer
delay(1000);
//change ID
mySerial.print(String("#") + LSS_ID_old + String("CID") + LSS_ID + "\r");
delay(2000);
}
void loop() {
}
Now you can control two motors at the same time:
#include <SoftwareSerial.h>
SoftwareSerial mySerial(8, 9);
#define LSS_ID1 1
#define LSS_ID2 0
int direction = -1;
void setup() {
mySerial.begin(115200); // Important! this is the standard speed for talking to LSS
mySerial.print("#0D1500\r"); // this is used to clear the serial buffer
}
void loop() {
// motor direction
mySerial.print(String("#") + LSS_ID + String("WR") +-direction*60) + "\r"); // RPM move
mySerial.print(String("#") + LSS_ID + String("WR") + 60*direction + "\r"); // RPM move
delay(5000);
// reverse direction
direction = -direction;
}
Troubleshooting
A reset may sometimes be needed
#include <SoftwareSerial.h>
SoftwareSerial servoSerial(8, 9);
// ID set to default LSS ID = 0
#define LSS_ID 254 // ID 254 to broadcast to every motor on bus
void setup()
{
mySerial.begin(115200); // Important! this is the standard speed for talking to LSS
mySerial.print("#0D1500\r"); // this is used to clear the serial buffer
delay(1000);
// reset
mySerial.print(String("#") + LSS_ID + String("DEFAULT")+"\r");
delay(500);
mySerial.print(String("#") + LSS_ID + String("CONFIRM")+"\r");
delay(2000);
}
void loop() {
}
Exercise:
Build a stopwatch with the smart servo and two buttons.
The movement of servo indicates the seconds elapsed.
Clicking the first button starts and stops the stopwatch. The 2nd button resets the stopwatch.
TIP: Use the millis() function to find the elapsed time.
Possible Solution: This is one solution but it could use some improvement: It needs a denounce and a pause without delay function to avoid blocking your code. This solution uses an older arduino library that might need to be updated.
#include <LSS.h>
#include <SoftwareSerial.h>
SoftwareSerial servoSerial(8, 9);
// ID set to default LSS ID = 0
#define LSS_ID (0)
#define LSS_BAUD (LSS_DefaultBaud)
// Create one LSS object
LSS myLSS = LSS(LSS_ID);
int ServoPosition = 0;
bool counting = true;
int resetTime = 0;
int lastMovement;
void setup() {
servoSerial.begin(LSS_BAUD);
// Initialize the LSS bus
LSS::initBus(servoSerial, LSS_BAUD);
Serial.begin(LSS_BAUD);
myLSS.move(0);
// allow time to move to 0 position
delay(3000);
myLSS.setMaxSpeed(600, LSS_SetConfig);
//buttons
pinMode(11, INPUT);
pinMode(10, INPUT);
}
void loop() {
delay(1000);
if (counting) {
int seconds = (millis() - resetTime)/1000; // see below for an explanation of resetTime
ServoPosition = seconds * 60; // if we divide 360 by 60 we get 6.0 degrees
myLSS.move(ServoPosition); // move servo to position
Serial.println(seconds);
lastMovement = millis();
} else {
resetTime = millis() - lastMovement; // this helps us return to the last position of the clock movement
}
// buttons
if (digitalRead(10) == HIGH) {
// stop or start
counting = !counting;
Serial.println("Start/Stop");
// this could be improved on with a debounce!
}
if (digitalRead(11) == HIGH) {
// reset
Serial.println("reset");
myLSS.move(0);
delay(2000);
resetTime = millis(); // we use this to restart our counter from 0
}
}
Here is a better solution, that is non-blocking and implements debouncing with a debounce library.
#include <LSS.h>
#include <SoftwareSerial.h>
#include <ButtonDebounce.h>
#define pinStopStart 10
#define pinReset 11
SoftwareSerial servoSerial(8, 9);
ButtonDebounce buttonStartStop(pinStopStart, 250);
ButtonDebounce buttonReset(pinReset, 250);
// ID set to default LSS ID = 0
#define LSS_ID (0)
#define LSS_BAUD (LSS_DefaultBaud)
// Create one LSS object
LSS myLSS = LSS(LSS_ID);
//
bool timing = true;
long timer = 0;
long lastTimer = 0;
int lastTimerSecond;
void setup() {
servoSerial.begin(LSS_BAUD);
// Initialize the LSS bus
LSS::initBus(servoSerial, LSS_BAUD);
Serial.begin(LSS_BAUD);
myLSS.move(0);
// allow time to move to 0 position
delay(3000);
myLSS.setMaxSpeed(600, LSS_SetConfig);
//buttons
buttonStartStop.setCallback(startStop);
buttonReset.setCallback(resetTimer);
}
void loop() {
buttonStartStop.update();
buttonReset.update();
if (timing) {
updateTimer();
if (getTimerSeconds() > lastTimerSecond) {
int ServoPosition = getTimerSeconds() * 60; // if we divide 360 by 60 we get 6.0 degrees
myLSS.move(ServoPosition); // move servo to position
Serial.println(getTimerSeconds());
lastTimerSecond = getTimerSeconds();
}
}
}
void startStop(int state) {
// start or stop the timer
if (state == HIGH) {
// stop or start
Serial.println("Start / Stop");
timing = !timing;
lastTimer = millis(); // record that time when we last started or stoped the timer
}
}
void resetTimer(int state) {
if (digitalRead(11) == HIGH) {
Serial.println("reset");
myLSS.move(0);
timer = 0; // reset Timer
lastTimerSecond = getTimerSeconds();
}
}
int getTimerSeconds() {
return floor((timer) / 1000);
}
void updateTimer() {
timer += millis() - lastTimer;
lastTimer = millis();
}
Wifi and Lynx Smart Motion
Here is an example for connecting processing to Arduino wifi rev 2 wirelessly with shiftr.io.